


The satellite-guided robot mower that requires no antenna on your property
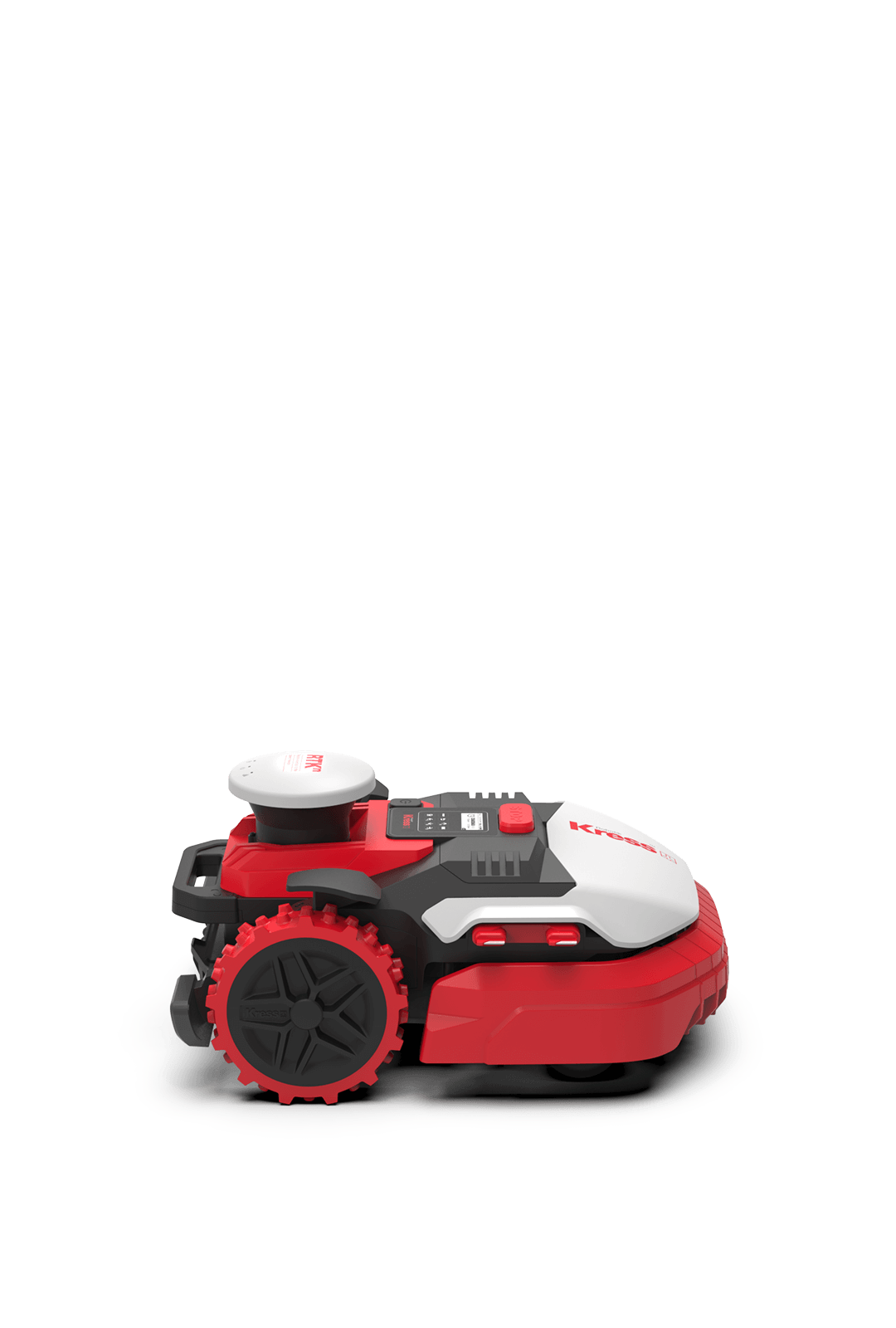
The new Kress RTKn autonomous mowers deliver inch-level accuracy without additional hardware.
Watch the videoNothing is better
NO boundary wire
For nearly 30 years, the only way to keep a robot mower inside its working area was with a powered wire

NO beacons
This positioning method requires installing at least three beacons on your property.
NO antenna
Conventional RTK systems work with an antenna installed on your roof or lawn.
Real Time Kinematic at your service
RTK is a state-of-the-art geo-positioning technique that enhances the precision of position data derived from satellite-based positioning systems.
How it works
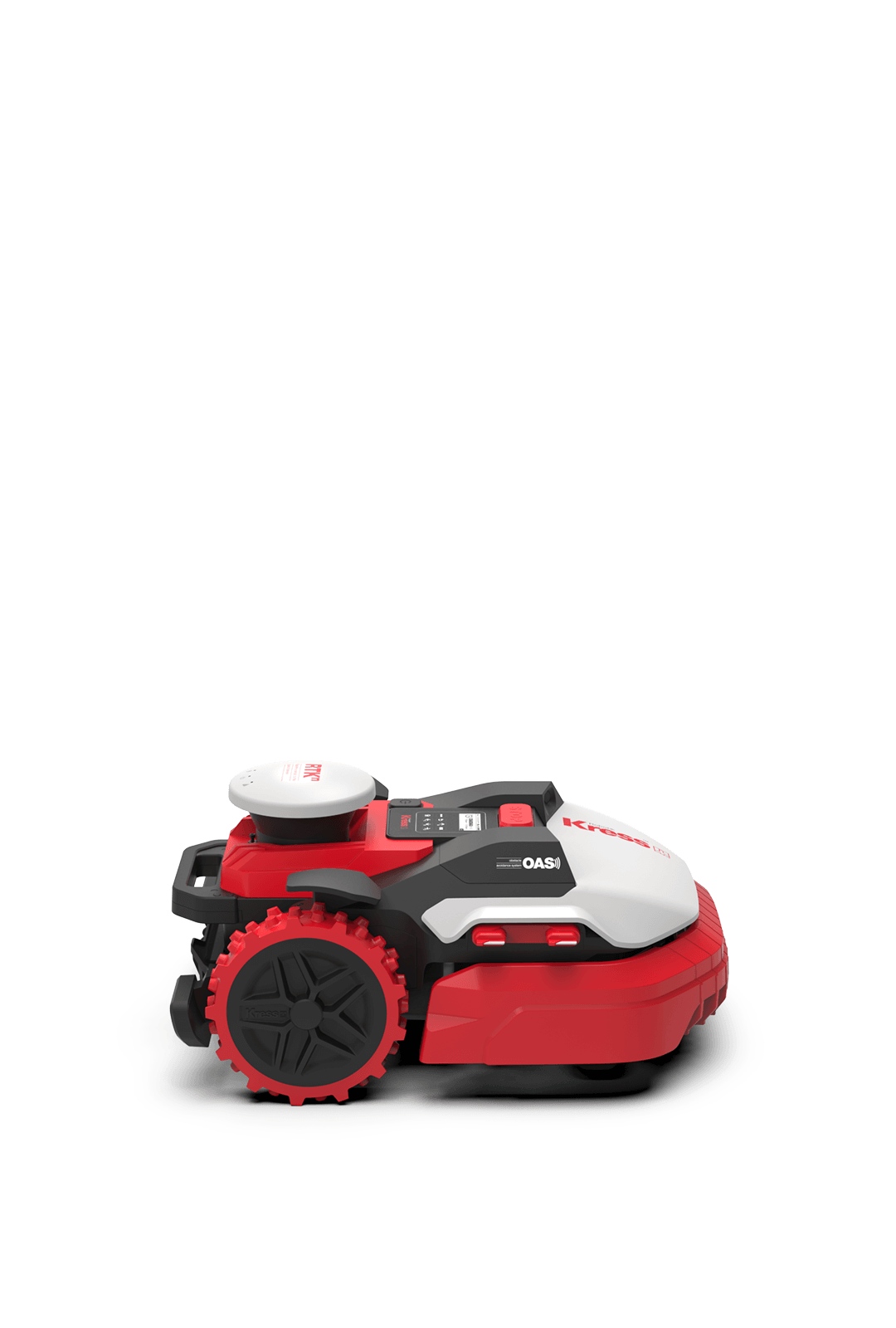
Your mower
Available for lawns from 1/4 acre to 9 acres, there’s a Kress RTKn model for you.
Explore the range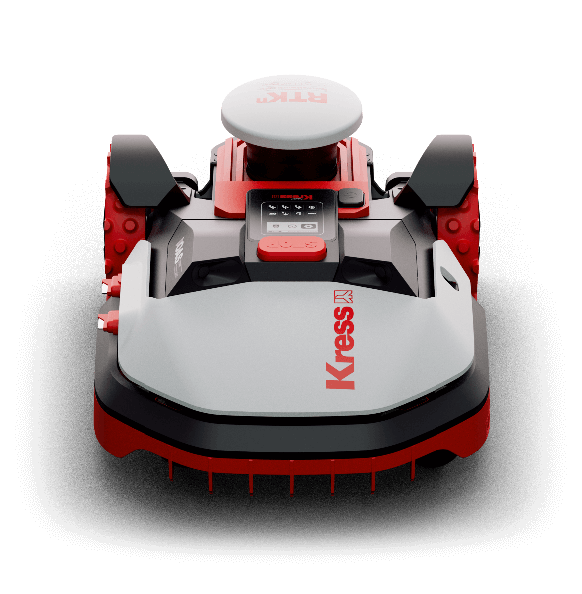


Your lawn
Expect your best lawn ever, with fresh-cut stripes every single day.
The benefits of daily mowing
Our network
Each antenna of our exclusive network ensures extensive coverage, connecting multiple lawns seamlessly.
Verify the coverage at your local dealer

Your best turf ever
Daily mowing encourages robust root systems and reduces plant stress, making the difference between a just good-looking lawn and one that’s healthy and lush.
Kress blades' precise cuts produce ultra-fine clippings that decompose quickly, returning essential nutrients to the soil and reducing the need for fertilizers. This natural process improves soil structure, increasing water infiltration and retention.
For very large areas where heavy lawn tractors and zero-turn mowers are used, the lightweight design of Kress autonomous mowers minimizes soil compaction. This preserves the soil’s ability to absorb and retain water and nutrients, roots can breathe and grow deeper, boosting the lawn’s resilience to environmental stresses.
Kress RTKn precision mowing promotes a denser, healthier grass canopy, naturally contrasting weeds propagation and diminishing the reliance on chemical herbicides.
Daily fresh-cut stripes: your lawn’s new signature
Kress RTKn mowers follow a parallel line pattern. The result? Beautifully aligned stripes that make your lawn a neighborhood showpiece. Every single day.
Watch the videoMowing efficiency, redefined
Kress systematic cutting in parallel lines allows a single mower to manage up to 9 acres. Not enough? Kress robot mowers are also designed to operate in fleets.
Master of complexity
Guided by satellites, Kress robot mowers excel at navigating complex landscapes and confidently follow even the most tortuous paths from one turf area to another.
Watch the videoNeighbor’s grass always greener? Not anymore
Turf experts agree: frequent mowing is the most crucial step for improving your lawn’s health and visual charm. Don’t have time? Kress does it daily.
Greener landscapes
Kress robotic mowers significantly lower the carbon footprint of any property, from private homes to commercial facilities, fostering greener and more enjoyable living and working environments.

Zero emission
No polluting exhaust fumes, no emission of greenhouse gases.
Quiet operation
Hotels can groom their lawns overnight without disturbing a single dream.

Operational savings
No labor cost, negligible impact on your energy bill, minimal maintenance expense as compared to gas mowers.
Guided by satellites, precision perfected
Kress’s exclusive network of base station antennas delivers accurate correction data to each individual mower, ensuring pinpoint accuracy for every blade of grass.
Watch the videoWhat if there’s poor satellite signal?
If satellite signals are obstructed by buildings or trees, Kress mowers switch to inertial navigation and odometry to maintain accurate routing, until a clear satellite connection is available again.
Learn more
Inertial navigation
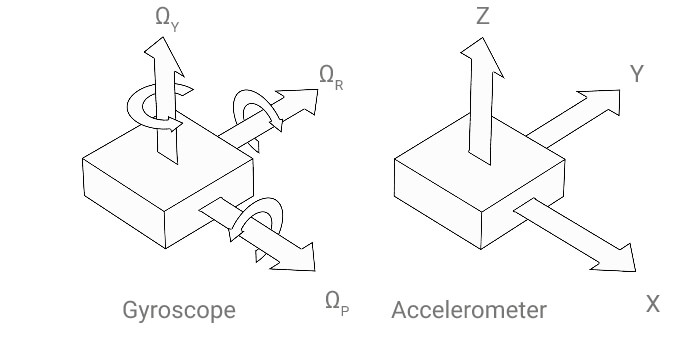
An inertial navigation system is typically formed of three orthogonal accelerometers and three orthogonal gyroscopes that measure tri-axial linear acceleration and angular velocity, respectively.
Inertial navigation, or dead reckoning, is based on motion-sensing devices connected to a computer that constantly computes the position, velocity and orientation of a moving object. For moving objects that rely on external references, e.g. satellite navigation or computer-vision navigation, inertial navigation is used when such external references are temporarily unavailable. Inertial navigation is subject to cumulative errors. Accuracy depends on the precision of its motion-sensing devices and, most importantly, on the algorithm that computes data.
Did you know?
While today we think of dead reckoning in terms of satellite navigation, this term has been around since at least 1613, as recorded in the Oxford English Dictionary. Historically, dead reckoning was a fundamental technique in marine navigation, used to estimate a ship’s position by advancing a known position using estimations of speed and course. Navigators employed clever devices like the ‘chip log’ to gauge a vessel’s speed through the water.
Stay in control
Easily set mowing schedules, manage charging stations, customize working zones, and more.


Kress RTKn for commercial turf care
Discover how transitioning from manned lawn mowing to unmanned turf care will benefit your business.
Learn what Kress can dofor you, your business,
and the planet.





We’re growing our dealer network.
Leave your email, and we’ll let you know when a Kress dealer opens near you.